Ziel des Projektes ist die Entwicklung eines modularen Lokalisierungsgeräts, welches die Bestimmung der genauen Position und Orientierung mobiler bodengebundener Systeme wie Fahrerloser Transportfahrzeuge (FTF) oder mobiler Roboter im Außenbereich mittels GPS und im Innenbereich auf Basis des NaviFloor® ermöglichen soll. Das Gerät soll unabhängig von den Sensoren des FTF oder des mobilen Roboters arbeiten.
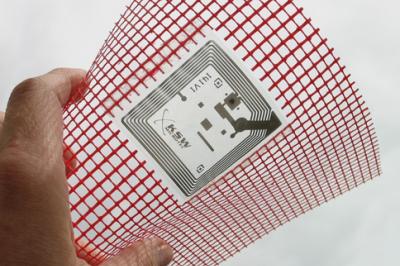
Kernidee ist die Trennung der Hardware zur Lokalisierung des FTF von der Hardware zur Steuerung des FTF, um den Integrationsaufwand für FTF-Hersteller zu minimieren. Zusammen mit der Future-Shape GmbH wird ein Gerät entwickelt, das neben einem integrierten GPS und einem RFID-Leser über weitere Sensoren zur Orientierungsbestimmung und zur genauen Positionsinterpolation verfügen soll. Durch geeignete Fusionierung der Sensormesswerte miteinander und mit den Daten des RFID-Lesers soll eine genaue Bestimmung der Orientierung und Position ermöglicht werden.
Projektpartner
Förderung