
Teilvorhaben: KI-gestützte Lokalisierung und Feinpositionierung von Lastaufnahme- und Lastübergabemitteln in der Intralogistik als Ergänzung an existierenden Roboter-Anlagen
Projektbeschreibung
Das Projekt „SmartPos“ entwickelt eine innovative Lösung zur präzisen Feinpositionierung von Fahrerlosen Transportfahrzeugen (FTF) bzw. mobilen Robotern. Aktuelle Systeme stoßen dabei auf zahlreiche Herausforderungen: Mechanische Zentrierungen verursachen hohe Kosten, Inbetriebnahmezeiten sind lang und die Anforderungen an die Bodenbeschaffenheit sind hoch. Die Schwierigkeiten beim Einparken eines PKW kennt jeder – bei mobilen Robotern muss nach dem Parken zusätzlich noch eine Last übergeben werden, wodurch die Genauigkeit sehr hoch sein muss. Diese Schwächen führen zu Ineffizienzen und Störanfälligkeit bei der intralogistischen Materialübergabe.
SmartPos setzt auf den Einsatz von Sensoren und Künstlicher Intelligenz (KI), um die genaue Position der Lastaufnahme relativ zur Station zu erfassen und Fehler, die durch Toleranzen und Bodenunebenheiten entstehen, auszugleichen. Das System ermöglicht eine Erkennung der Stationen ganz ohne künstliche Marker und eine autonome Anpassung an verschiedene Umgebungsbedingungen.
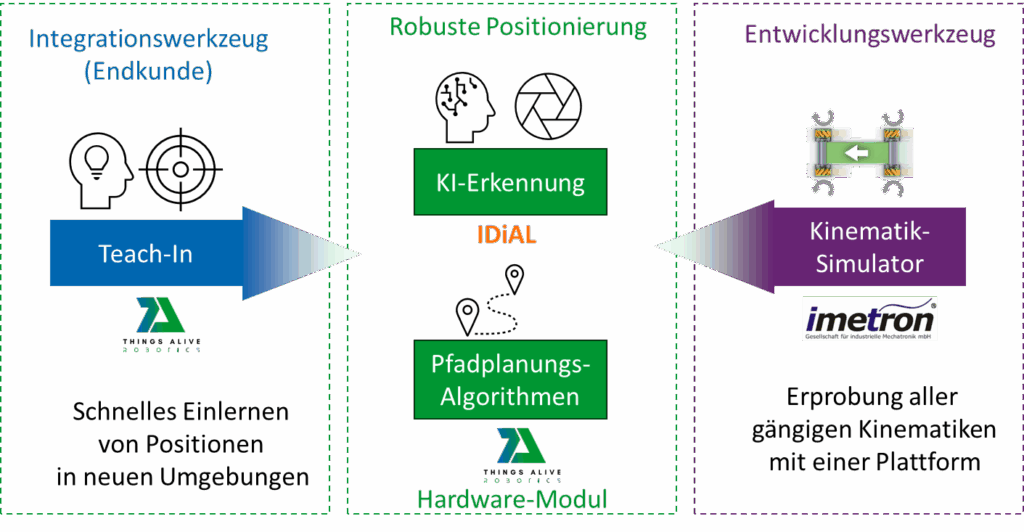
Mit SmartPos sollen bauliche und räumliche Anforderungen minimiert werden, was die Integration in bestehende Systeme vereinfacht und die Kosten für die Automatisierung von Materialflussprozessen senkt. Das Ergebnis ist eine Hardwarekomponente mit zugehöriger Konfigurationssoftware, wodurch eine einfache Integration möglich ist. Dadurch wird nicht nur die Effizienz der Materialübergabe gesteigert, sondern auch die Zugänglichkeit für kleine und mittelständische Unternehmen erhöht. SmartPos zielt darauf ab, den Automatisierungsgrad in der Logistik zu erhöhen und neue Möglichkeiten für die Integration autonomer Systeme in industrielle Prozesse zu schaffen.
Förderung
Förderkennzeichen
KK5119004GR4