

EduRob ist ein handlicher mobiler Roboter speziell entwickelt für die Lehre. Mittels eines geschickten Designs ist es möglich unterschiedliche Antriebsarten wie Mecanum-, Omniwheel- und Differentialantrieb abzudecken.
Github Projekt: https://github.com/IDiAL-IMSL/Edurob

Hintergrund
Im Robotiklabor steht eine Vielzahl an unterschiedlichen Roboter für den Einsatz und Lehre und für die Bearbeitung von Abschlussarbeiten zur Verfügung. Doch vereint sie alle ein großer Nachteil: Sie fahren lieber selber als sich tragen zu lassen. Hierdurch beschränkt sich aber auch ihr Einsatzgebiet auf das Labor selbst und den angrenzenden Räumen.
Gerade für die grundlegende Einarbeitung in die Mobilrobotik wie die Ansteuerung unterschiedlicher Antriebe (Mecanum, Omniwheel oder Differentialantrieb), der Umsetzung regelungstechnischer Aufgaben und der Anbindung von Sensorik ist die Versuchsfläche des Robotiklabors nicht unbedingt erforderlich. Hierdurch entstand die Anforderung eine flexible Plattform, die alle Antriebsarten abdecken kann, zu entwickeln, die klein genug ist, um in einem Rucksack mit ins Homeoffice genommen zu werden.
Mögliche Konfigurationen
EduRob kann mit drei oder vier Motoren und unterschiedlichen Radtypen ausgestattet werden. Dabei können die Motoren durch das Lösen von jeweils zwei Schrauben flexibel umgesteckt und andere Räder auf die Motorachse aufgesteckt werden.
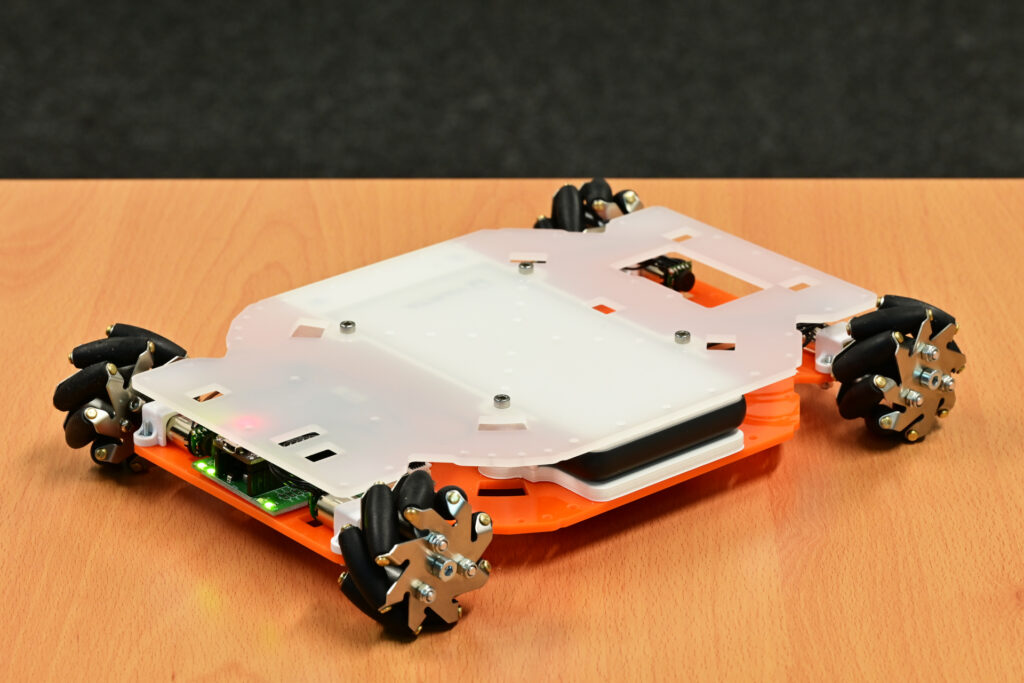
Mecanum
Mit vier Motoren an den vier äußeren Ecken kann EduRob zu einem Roboter mit klassischem Mecanum-Antrieb gemacht werden. Das Fahrverhalten entspricht so dem von OmniMan und den anderen Mecanum-Robotern des IMSL.
Omniwheel mit drei Rädern (120°)
Mit drei Motoren kann EduRob die klassische Omniwheel-Konfiguration abbilden. Drei jeweils um 120° gedrehte Räder ermöglichen so ein omnidirektionales Fahrverhalten.

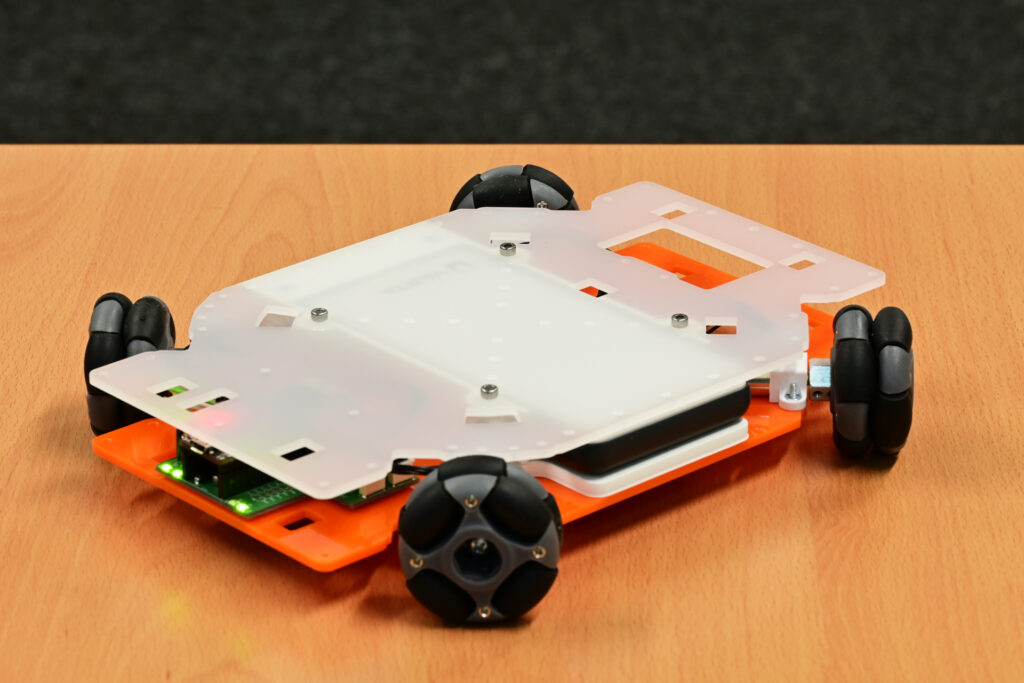
Omniwheel mit vier Rädern (90°)
Neben der klassischen Anordnung mit drei Omniwheels kann EduRob auch die Sonderform mit vier Omniwheels abbilden. Hierbei werden vier Omniwheels um jeweils 90° zueinander gedreht angeordnet. Im Vergleich zur Mecanum-Anordnung sind die Räder dabei quasi um 45° gedreht. Auch in dieser Konfiguration ist EduRob omnidirektional fahrbar.
Differentialantrieb bzw. Skid-Steer-Antrieb
Das Fahrverhalten der Pioneer-Roboter im IMSL-Bestand wird durch die Verwendung von vier Rädern ermöglicht. Auch wenn die Anordnung der Räder der Mecanum-Anordnung entspricht, ist durch die Verwendung klassischer Räder ohne freilaufende Rollen ein Seitwärtsfahrt nicht möglich. Neben der Vorwärts- und Rückwärts-Bewegung und der Drehung um den Mittelpunkt der Plattform ist das Fahren von Kreisbögen möglich. Diese Art des Antriebs wird auch Skid-Steer-Antrieb genannt. Durch den 4×4-Antrieb ist diese Konfiguration dabei besonders gut für unebenes Gelände geeignet. Durch den Wegfall von freilaufenden Rollen auf den Rädern können diese nicht so einfach verunreinigen und blockieren.

Durch die Verwendung von zwei klassischen Rädern und ein oder zwei nicht angetriebenen Omniwheels ist zudem ein richtiger Differentialantrieb möglich. Dabei wandert der Rotationspunkt in den Mittelpunkt zwischen den beiden angetriebenen Rädern. Während sich dies auf die Drehung des Roboters auf dem Punkt auswirkt (der vordere Teil schwenkt aus) behält er aber seine begrenzte Bewegungsfreiheit (vorwärts, rückwärts, drehen und Kreisbögen fahren). Die „Geländegängigkeit“ nimmt durch die Reduktion auf zwei angetrieben Räder ab und die Verwendung von Omniwheels erhöht das Risiko der Verschmutzung von freilaufenden Rollen.

Komponenten
EduRob ist neben dem modularen Antriebskonzept und einer USB-Powerbank zur Stromversorgung mit einer speziell entwickelten Platine zur Steuerung und Regelung ausgestattet. Die auf der ESP32-Familie basierte Steuerungsplatine beinhaltet Treiber für die Motoren und ermöglicht eine Anbindung über Bluetooth und WLAN an Notebooks und Smart-Devices. Eine ROS-Schnittstelle ist vorhanden, sodass von ROS bereitgestellte Algorithmen genutzt werden können.
Vielen Dank an die Plottwerkstatt Design für das Fertigen der Platten des EduRobs.
Team
EduRob wird von einem interdisziplinären Team zwei Mitarbeitern des IMSL entwickelt. Maschinenbau und technische Informatik machen EduRob zu einem universellen Roboter für die Lehre.