
Der kleine omnidirektionale Messroboter ist nicht viel größer als ein Eurobehälter. Dennoch ist er, wie sein großer Bruder OmniMan, mit einem omnidirektionalen Mecanum-Antrieb ausgestattet. Über mehrere Daten- und Stromanschlüsse auf der Oberseite kann der kleine Roboter schnell und einfach mit Sensoren erweitert werden.
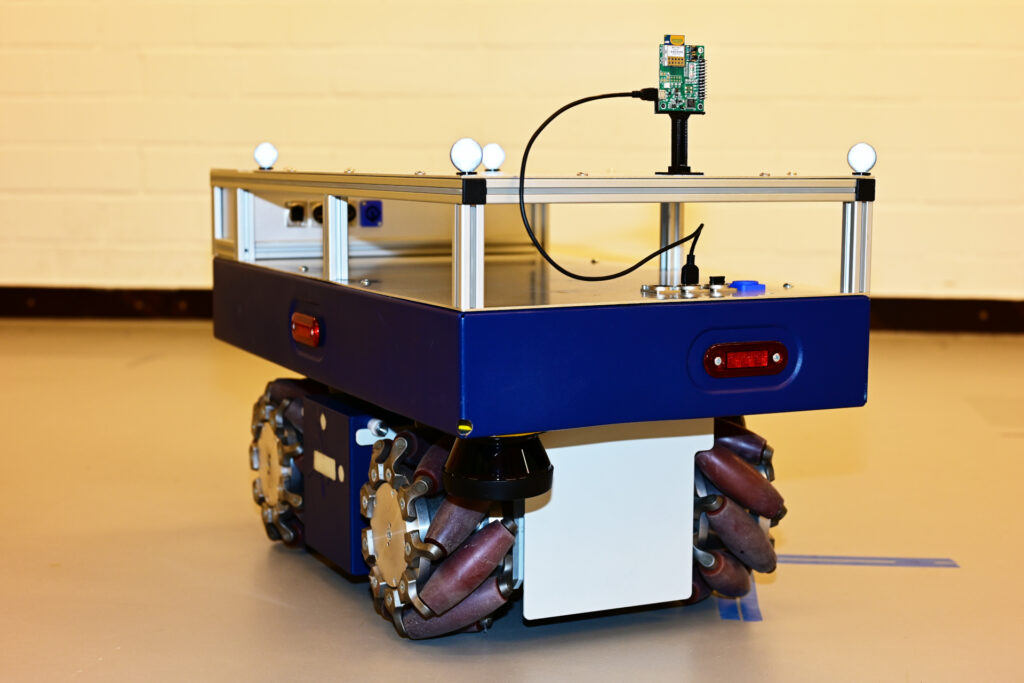
Auch ohne weitere Sensoren ist der kleine Roboter schon mit Sicherheitslaserscanner ausgestattet, die auch zur Lokalisierung eingesetzt werden können. Über die Anordnung an zwei Ecken werden von den beiden 270°-Scannern insgesamt die vollen 360° abgedeckt.
Ein fest verbauter Industrie-PC steuert die vier Motoren der Mecanum-Räder über ein CAN-Bus an. Hierfür wird die am IMSL entwickelte Roboter-Software auf einem Echtzeit-Linux-System genutzt. Dies ermöglicht den Einsatz von ROS-Paketen.
Entstanden ist der Roboter in einem ZIM-Projekt mit der Firma imetron aus Umkirch bei Freiburg. Unter der Marke DONKEYmotion konnte imetron im Projektanschluss eine ganze Produktpalette rund um kleine und große Mecanum-Plattformen entwickeln.