Projektziel
Ziel des Projektes ist die Entwicklung von omnidirektionalen fahrerlosen Transportfahrzeugen (FTF), welche automatisch Lasten in Lagern, Distributionszentren oder auch in der Produktion transportieren können. Die Fahrzeuge sollen in ein Fahrerloses Transportsystem (FTS) integriert werden können.
Durch ein Mecanum-Fahrwerk soll eine Flächenbeweglichkeit der FTF erreicht werden, die gegenüber herkömmlichen linienbeweglichen FTF eine bessere Navigierbarkeit und damit eine höhere Flexibilität in beengten Umgebungen bietet. Durch die Flächenbeweglichkeit können Transportaufgaben durchgeführt werden, die in beengten Umgebungen mit üblichen FTF nicht möglich sind.
Durch ein neuartiges Lokalisierungsverfahren soll eine Navigation und Kollisionsvermeidung der FTF auch in beengten Umgebungen ohne die sonst übliche Spurbindung möglich werden. Das neu zu entwickelnde FTS soll in Produktion und Intralogistik automatisiert Transportaufgaben übernehmen, die bislang manuell durchgeführt werden müssen. Gerade in Betrieben, die zunächst nicht für FTF ausgelegt wurden, können dadurch Transportaufgaben automatisiert werden. Durch die automatische Kollisionsvermeidung können Hindernisse, die den Fahrweg teilweise blockieren, umfahren werden, die bei einem linienbeweglichen Fahrzeug mit optischer Spurführung zur Blockierung des gesamten Transportvorgangs führen würden.
Projektpartner
Projektpartner im Verbundprojekt ist die imetron Gesellschaft für industrielle Mechatronik mbH. imetron ist im Projekt für die mechanische und mechatronische Entwicklung sowie die Systemintegration verantwortlich. Das im Projekt entstehende fahrerlose Transportsystem (FTS) wird von imetron vermarktet (siehe Link).

Projektergebnisse
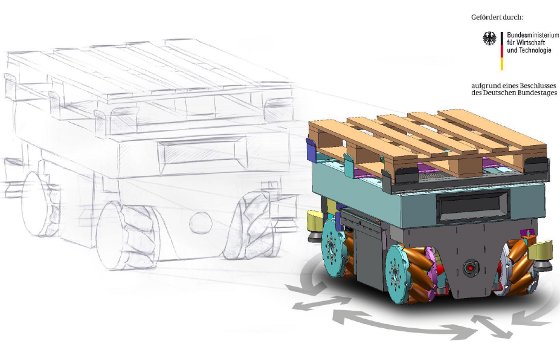
Im Projekt werden zwei Prototypen von omnidirektionalen FTF entwickelt. Das größere FTF ist in der Lagen Euro-Paletten zu transportieren, das kleinere Fahrzeug ist dafür ausgelegt, Euro-Behälter (60 cm x 40 cm) zu transportieren. Durch das Euro-Rastermaß ist es auch möglich, zwei Behälter mit dem Grundmaß 40 cm x 30 cm zu befördern (siehe Abbildung).


Die Fahrzeuge sollen die Basis für eine Produktfamilie bilden, welche für innerbetriebliche Logistikprozesse einsetzbar ist. Durch Modularität soll eine Anpassung an unterschiedliche Logistikprozesse möglich sein. Zusammen mit einer Transportleitsteuerung bilden die Mecanum-angetriebenen FTF ein Fahrerloses Transportsystem (FTS), welches flexibel an die Bedürfnisse der Betreiber angepasst werden kann.
Das größere Mecanum-FTF für den Transport von EUR-Paletten erreicht überragende Leistungsdaten. Innerhalb der kompakten Abmessungen, kaum größer als die EUR-Palette selbst, wurde ein Fahrzeug realisiert das die maximale Tragfähigkeit einer genormten EUR-Palette von 2t problemlos trägt. Die Fahrdynamik des Paletten-FTF ist sehr robust, Hindernisse in den Maßen einer Zigarettenschachtel können problemlos bewältigt werden, ohne dass der Mecanumantrieb hierbei wesentlich von seiner Bahn abkommt.
Das kompakte Klein-FTF für den Transport von KLT-Behältern wird von Mecanum-Räder mit einem Durchmesser von nur 190 mm angetrieben, die im Vergleich zum Stand der Technik einen außerordentlich schwingungsarmen Rundlauf haben. Der Durchmesser ist determiniert durch genormte Sicherheitsanforderungen für FTF. So benötigen die Sicherheits-Laserscanner zum Personenschutz eine 360° rundum Sicht auf 200mm Höhe über dem Boden. Trotz dieser kompakten Abmessung des Rades wurde eine Belastbarkeit von über 270kg je Rad erreicht. Das Rad ist Bestandteil einer kompakten Mecanum-Rad-Antriebseinheit die modular in unterschiedlichsten Fahrzeugkonzepten eingesetzt werden kann.
Videos
Das Video zeigt den Palettentransport auf der Hannovermesse 2015
Förderung